




Nebit çeleklerini ýaglamak üçin ýöriteleşdirilen awtomatiki ýüklemek platformasy
Önüm aýratynlyklary
| Gaplamak üçin material görnüşi: PE kwadrat çelek |
| Marka: Günüň dogmagy akylly enjamlar |
| Custöriteleşdirilen: Hawa |
| Ulag bukjasy: Agaç gap |
| Programma: ýag çeleklerini ýaglamak |
Haryt belligi
Custöriteleşdirilen ulgam, ýag çalýan ýaglar, sortlamak we iýmitlendirmek ulgamy, awtomatiki platforma, doldurma maşyn, gaplaýyş maşynlary, gaplaýyş maşynlary, ýag çalýan liniýa, ýöriteleşdirilen maşyn, döwülmeýän maşyn, lýuboý ýagy.
Haryt maglumatlary
Enjamlary tanatmak
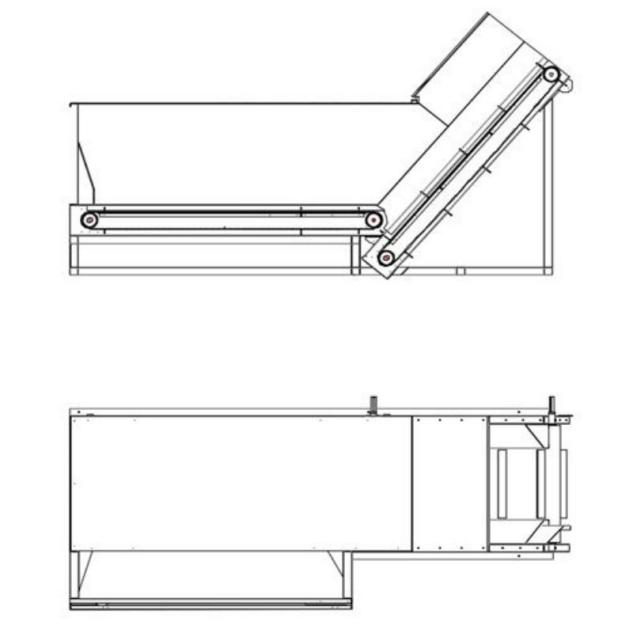
1. Çelek göteriji kemer enjamy:
Iki basgançakly guşak konweýer, ýag çeleklerini belli bir beýiklige çykarýar we çüýşäni işleýän konweýerine iberýär.Guşak berkitmesiniň beýikligi, bir gatly nebit çelekleriniň göterilmegine we nebit çelekleriniň tebigy togalanmagyna amatly ýag çelekleriniň galyňlygynyň ýarysyndanam azdyr.

2. Çüýşäni dürli-dürli işlemek:
Köp bölümli daşamagyň diferensial tizligi, çalgy ýagy barreliniň gutarmagyny we eltilmegini amala aşyrmak üçin kabul edilýär.Barreliň giriş böleginiň geçiriş giňligi bir wagtyň özünde iki barrele geçmäge mümkinçilik berýär, bu bolsa barreliň özara ekstruziýa howpuny azaldýar we enjamyň işleýiş durnuklylygyny ýokarlandyrýar.Barreliň aralygyny sazlamak üçin köp basgançakly konweýer ädimme-ädim baglanyşyk gözegçiligi.

3. Wizual ýerleşiş kesgitleýiş ulgamy:
Tutuş konweýer giriş bölüminde gurnaldy.Wizual ýerleşiş ulgamy gowşurylan nebit çelekleriniň ýagdaýyny tapmak we kesgitlemek, maglumat maglumatlary döretmek we derňewden soň robot ulgamyna ibermek üçin surata düşer.Gözleg tarapy tarapyndan geçen nebit çelekleriniň sany, ýagdaýy we ugry kontrolleýere iberiler we gözegçilik ediji alnan signallara laýyklykda iki möý el robotyna degişli tutmak buýruklaryny iberer.
4. Çüýşe bilen işleýän möý el roboty:
Wizual kesgitleýiş ulgamy tarapyndan iberilen nebit barrelleriniň maglumatlaryna görä, tutulýan ýer nebit barrellerini tutmak üçin awtomatiki usulda düzüler we bäşinji okuň hereketi bilen nebit çelekleri tersine öwrüler we nebit çelekleri dik bolar. el bolsa konweýeriň garşysyna gönükdirildi.Iki möý roboty, iberilýän nebit çelekleriniň sanyna we tizligine görä awtomatiki usulda wezipeleri bellär.
5. Dikeldiş enjamy:
Esasy wezipesi, nebit çeleklerini nädogry tutmak bilen ýygnamak we aýratyn ýagdaýlarda nädogry tutmak bilen nebit barrelleriniň ýygnanmagynyň we zaýalanmagynyň öňüni almak.
6. Çelek daşaýjy enjam, her bölümi konweýer kemeri bilen doldurma maşynynyň konweýer guşagynyň arasyndaky baglanyşygy we geçişi gowy edýär, barreli kakmak, barreli gysmak we barreli yzyna gaýtarmak hadysasy bolmazdan.

